周末,打DOTA时发现没有麦,这让我怎么指挥队友保卫天辉?(大误 ),于是准备DIY一个。
先确定下线序
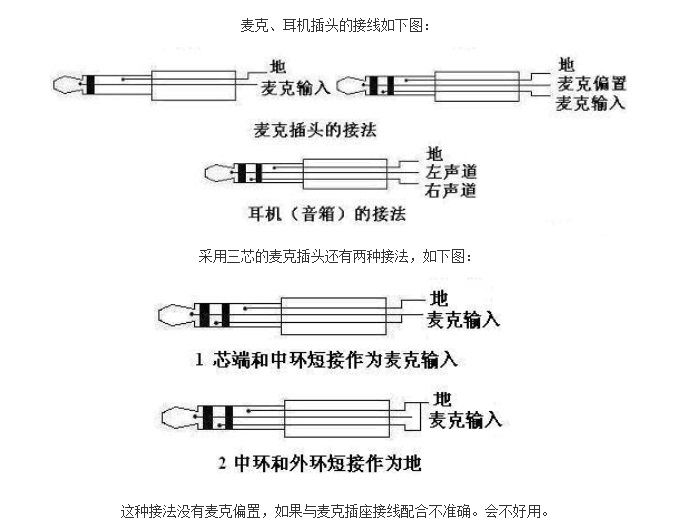
在我的电脑上,为下一种接法。一二节连在一起,为MIC输入。没有偏置输入的引脚。第三节接地。
继续阅读“DIY 驻极体话筒”
周末,打DOTA时发现没有麦,这让我怎么指挥队友保卫天辉?(大误 ),于是准备DIY一个。
先确定下线序
在我的电脑上,为下一种接法。一二节连在一起,为MIC输入。没有偏置输入的引脚。第三节接地。
继续阅读“DIY 驻极体话筒”
感觉淘宝上的廉价小台灯已经不能满足我了。于是打算买灯带DIY一个
先上淘宝买贴片LED灯带,没有找到高品质的灯珠。索性就先随便买点试试水。入了4米的5050与5630两种封装的贴片灯带(表面滴胶,去除透明胶皮色温不一致,偏黄色,色温不可调)。
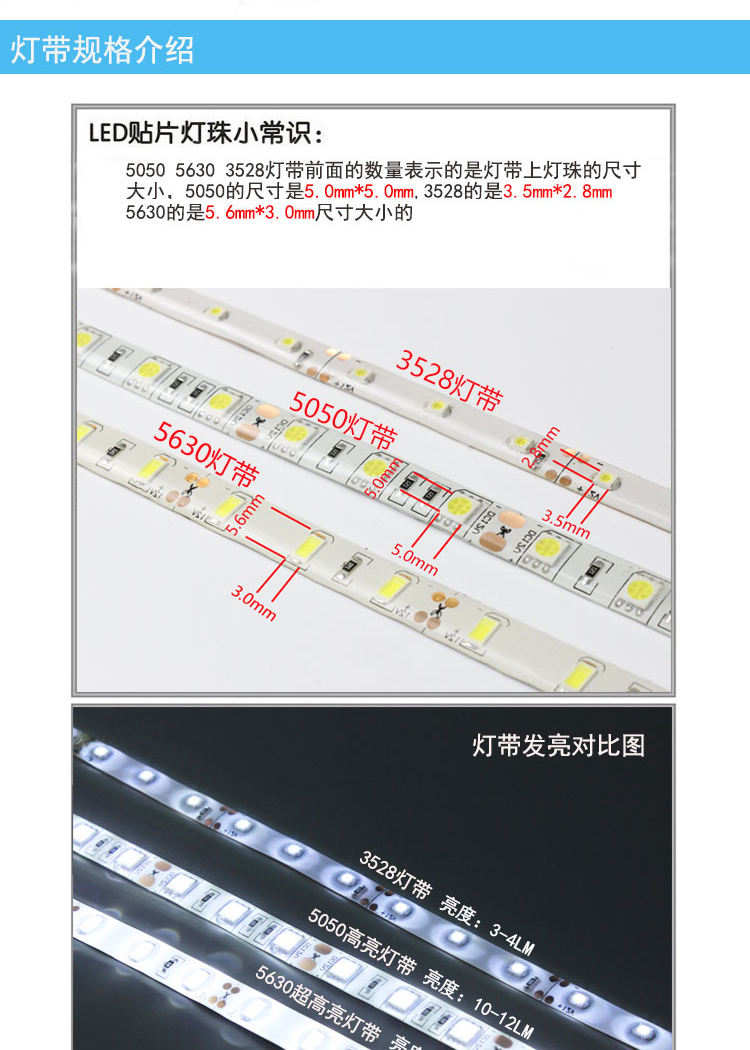
实际感觉亮度差并不是很大。可能是我并没有对比的原因。
继续阅读“DIY LED台灯”
看到萧井陌大神的专栏文章,这里发表一下个人看法。
萧大的专栏文章:http://zhuanlan.zhihu.com/p/19959253
入门阶段
萧大的建议是使用python入门(他的原话是启蒙),可以避免同时学习语法,计算机系统,与算法思想的问题。他给出的路线是:
不过我认为这没有必要,python是一个非常优雅&强力的脚本语言,不过如果以Unix的出现为现代计算机的开端的话,一切都是从命令式语言C开始的。OOP的思想在底层仍旧由堆栈和数据结构实现。所以还是用C最佳。至少对我来说如此。
继续阅读“The way of CS”
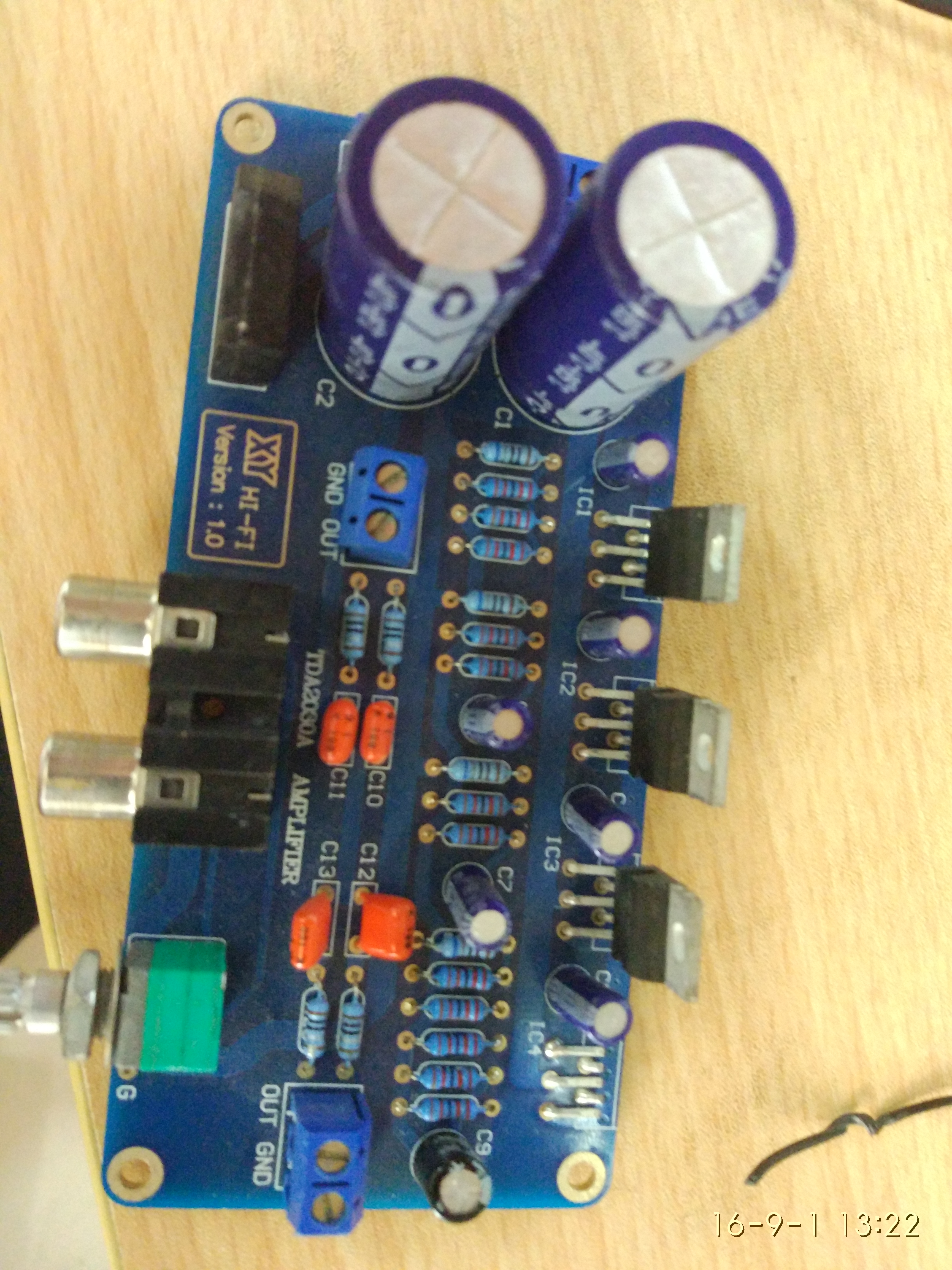
前几天出去捡了下垃圾。
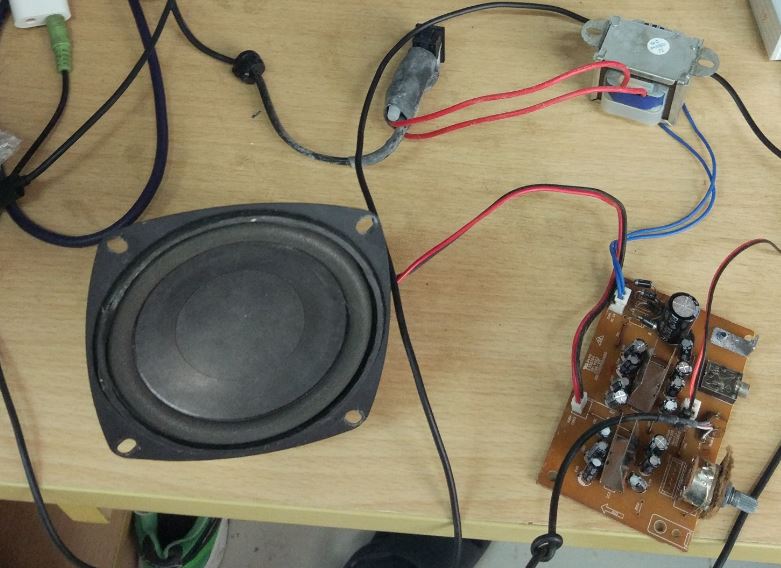
捡来的的废弃音箱,用的是线性电源。功放芯片被散热器遮住了,目测是TDA的老型号。本以为有几个电容爆了,没想到上了电直接能用。音质还不错,低频力道足。不过总体来说并不是十分均衡。(这只是一个低频喇叭。并不是全频的,感觉还得继续烧)。
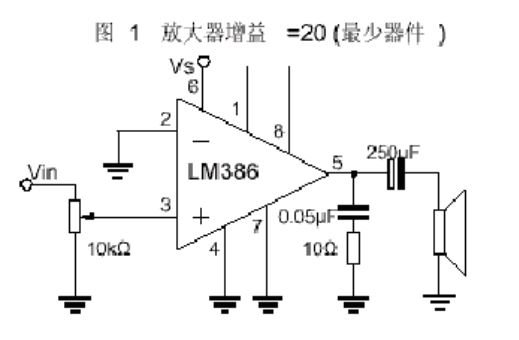
开学事情比较多,最近忙着收拾宿舍和上课。芯片元件什么的也没有买。就用之前的入门级芯片LM386功放芯片来初步搭一个实验电路来试下音质了。
耳机接口一般如图所示:
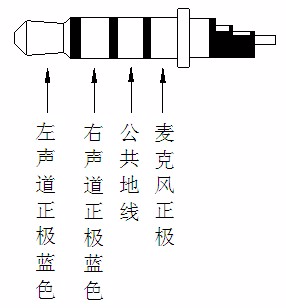
电脑接口为3线,3,4节皆地。
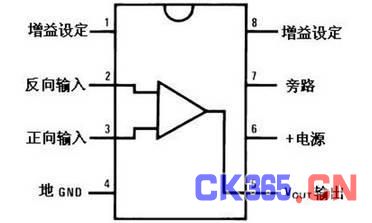
LM386引脚图如下:
直接上电路图
由于本人缺乏美感而且文笔欠佳,导致博客的排版和页面非常不美观。加上感觉自己写的毫无技术含量所以停更了半年,我会把一些有趣的事情写上去。(今天补充了好多博文>_<)
我只想记录一些对我有意义的事情,现在还有一段象牙塔时代,所以最近我会抽时间看一下前端,美化一下页面顺便换个架构,wordpress实在是太臃肿了。
————————————————分割线——————————————————
突然觉得这界面越看越顺眼了。干净简约。
核心代码只有5行
#includeint main() { int e[10][10],k,i,j,n,m,t1,t2,t3; int inf=99999999; //用inf(infinity的缩写)存储一个我们认为的正无穷值 //读入n和m,n表示顶点个数,m表示边的条数 scanf("%d %d",&n,&m); //初始化 for(i=1;i<=n;i++) for(j=1;j<=n;j++) if(i==j) e[i][j]=0; else e[i][j]=inf; //读入边 for(i=1;i<=m;i++) { scanf("%d %d %d",&t1,&t2,&t3); e[t1][t2]=t3; } //Floyd-Warshall算法核心语句 for(k=1;k<=n;k++) for(i=1;i<=n;i++) for(j=1;j<=n;j++) if(e[i][j]>e[i][k]+e[k][j] ) e[i][j]=e[i][k]+e[k][j]; //输出最终的结果 for(i=1;i<=n;i++) { for(j=1;j<=n;j++) { printf("%10d",e[i][j]); } printf("\n"); } return 0; }
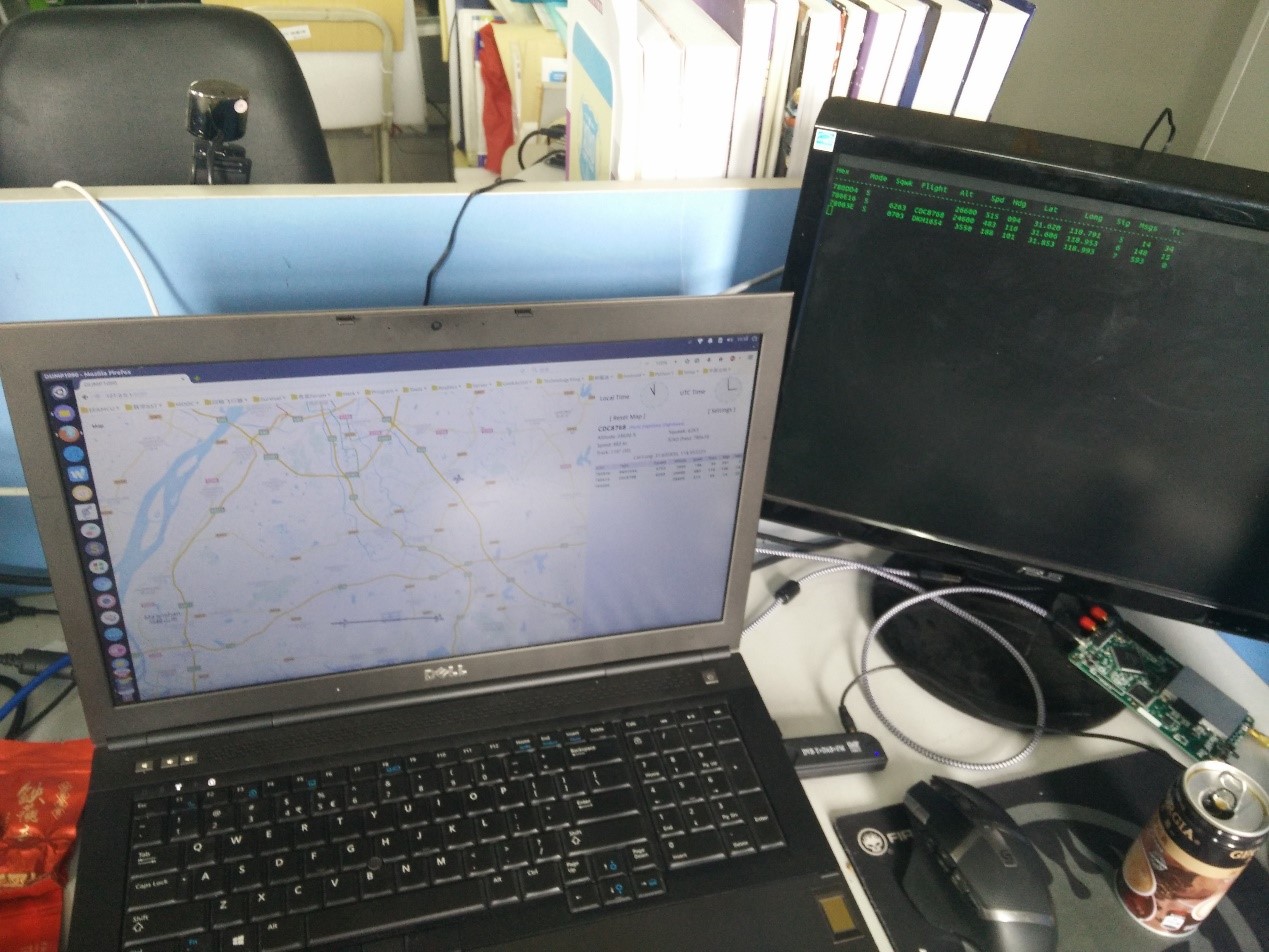
第一个四轴,我叫他火鸟,摔过无数次,修过无数次。曾创下过掉下水1个钟头捞上来只坏了一个数传模块的奇迹。当时在寒冬脱了衣服下水去捞,冻得要死。直到最后失控提控回家。有些事情不该被忘记。
玩这个时初涉SDR,不过到了现在还是不得其门而入。OsmocomBB,Hackrf模拟GPS等信号……犹如黑箱,能否有效work靠的是天意。也许我的智商只适合去调用API。
言归正传,关于ADS-B协议:
就是每个飞机回主动的报告自己的位置等信息,而不是被动的去探测,这样会增加安全性,作为雷达技术的一种补充
因为这个技术的信号信息等都是公开的,所以我们要做的就是接收信号并解码,这样我们就能获取附近飞机的信息了。
基于国外的开源DUMP1090项目,自己尝试了一遍,加上了点启动整合的脚本,做了点不值一提的微小工作。
关于ADS-B详细的协议与SDR的概念,调制解调过程详见文尾网盘链接中的文档。之前写过一个加了注释的版本文档,可是现在怎么也找不到了。时间过去有点久了。
项目地址http://www.satsignal.eu/raspberry-pi/dump1090.html
硬件采用的是国内常见的R820T
附上一张芯片对比:
| Tuner 芯片 | 频率范围 |
| Elonics E4000 | 52 – 2200 MHz, 其中1100 MHz to 1250 MHz无法覆盖 |
| Rafael Micro R820T | 24 – 1766 MHz |
| Fitipower FC0013 | 22 – 1100 MHz |
| Fitipower FC0012 | 22 – 948.6 MHz |
| FCI FC2580 | 146 – 308 MHz, 438 – 924 MHz |
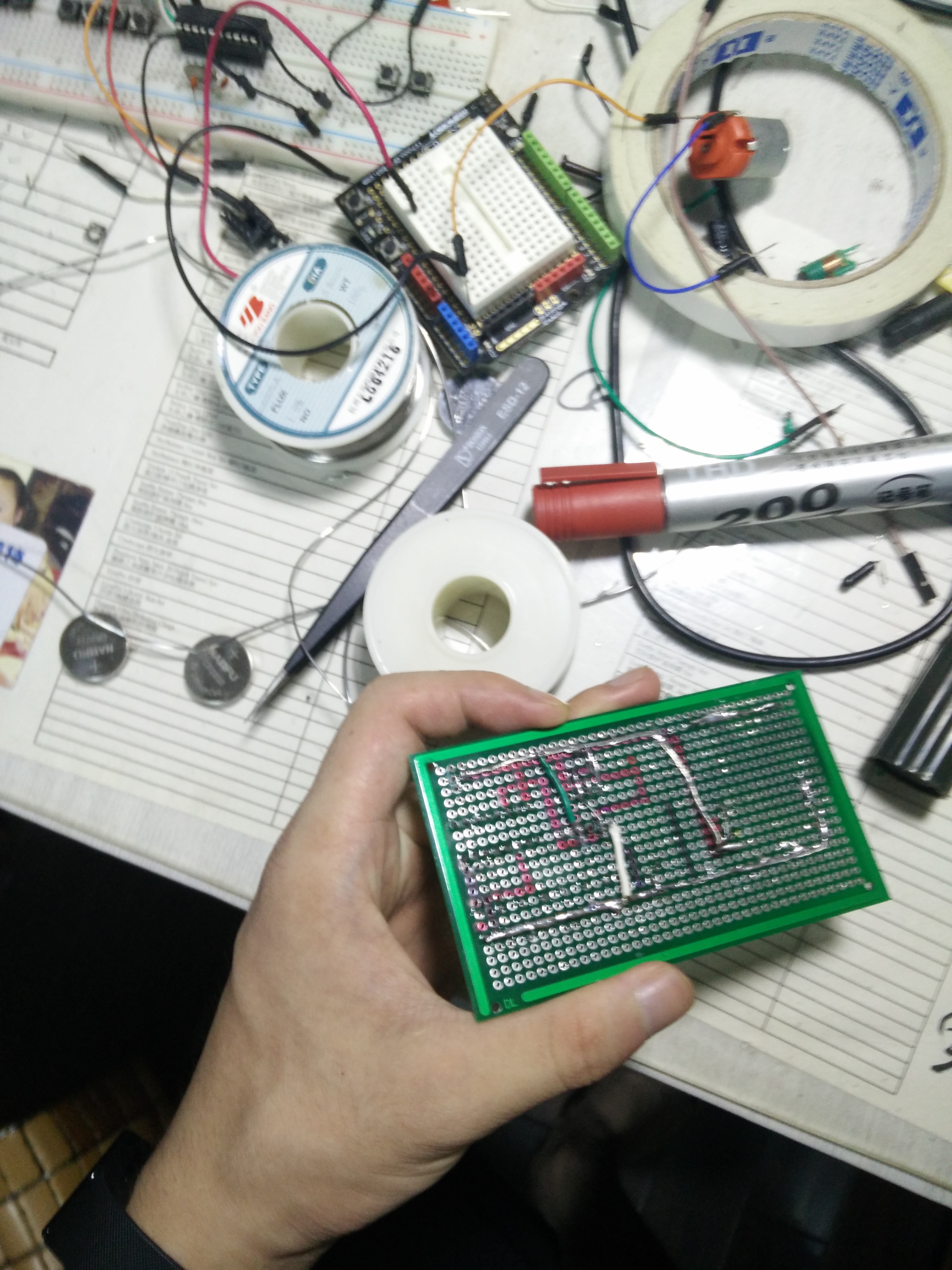
之前有个学妹问我如何不用单片机编程控制IO来做一个流水灯。第一反应就是NE555(工作在无稳态时基)+CD4017(译码/十进制计数)
好久没焊洞洞板,手也痒了,就把过程记录一下
首先先确定一下NE555无稳态输出方波的频率与占空比。
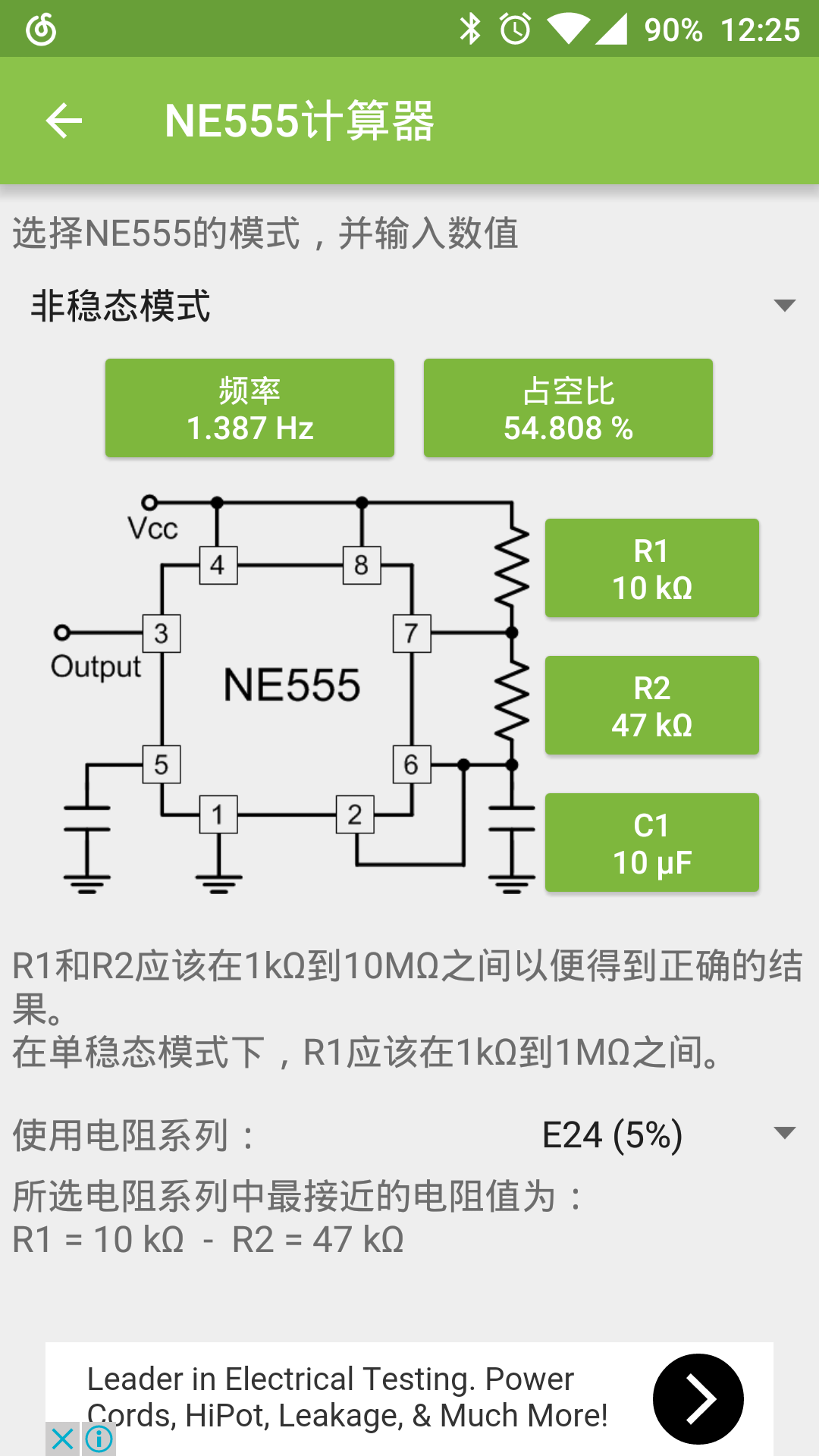
毕竟人眼看。0.5-3hz都行,占空比最好50%。不过也不用太精确。我用的参数如图所示。
这电路过于简单我就不画电路图了。NE555输出接入CD4017的CP脚,数字输出脚分别接LED。注意CMOS芯片由于高阻态千万不能让input引脚悬空就行。都根据实际接上拉电阻或者下拉到Gnd就行。