此文纪念我的2017年夏天。当时脱离了炸鸡与修机的无限循环,因为我开始玩RC车了
 还记得17年的夏天,真的是欢乐,除了无休无止的炸鸡
还记得17年的夏天,真的是欢乐,除了无休无止的炸鸡
 之前很难理解RC车船的乐趣在哪里,现在倒是能理解一些了。
之前很难理解RC车船的乐趣在哪里,现在倒是能理解一些了。

We all have two lives, the second begins when you realize you only have one — 前尘方逝,今生方始
此文纪念我的2017年夏天。当时脱离了炸鸡与修机的无限循环,因为我开始玩RC车了
还记得17年的夏天,真的是欢乐,除了无休无止的炸鸡
之前很难理解RC车船的乐趣在哪里,现在倒是能理解一些了。
视频挂了,日后补上
放点试飞(炸鸡)视频,都不是我在飞
1.漫天大雪飞冲浪
2.直机自旋翻
继续阅读“Fly”
一直对垂直起飞念念不忘,年前DIY了一架FT赤色幻象。特来记录一下

 成品图
成品图
继续阅读“FT 赤色幻象”
初涉固定翼,以前只玩过几次KT机,配置为:1806KV 2280无刷电机配上2S 1500mah电池(应该选用3S 1000mah更佳)搭配12A电调与5寸小桨。配了廉价的MC6A控(国产杂牌)。材质是所谓的魔术板(PP板),就用来练练手感。
 图为组装好后的状态,放下试飞视频,稳的话一般般,还需要调。
图为组装好后的状态,放下试飞视频,稳的话一般般,还需要调。
继续阅读“三角翼试飞”
第一个四轴,我叫他火鸟,摔过无数次,修过无数次。曾创下过掉下水1个钟头捞上来只坏了一个数传模块的奇迹。当时在寒冬脱了衣服下水去捞,冻得要死。直到最后失控提控回家。有些事情不该被忘记。
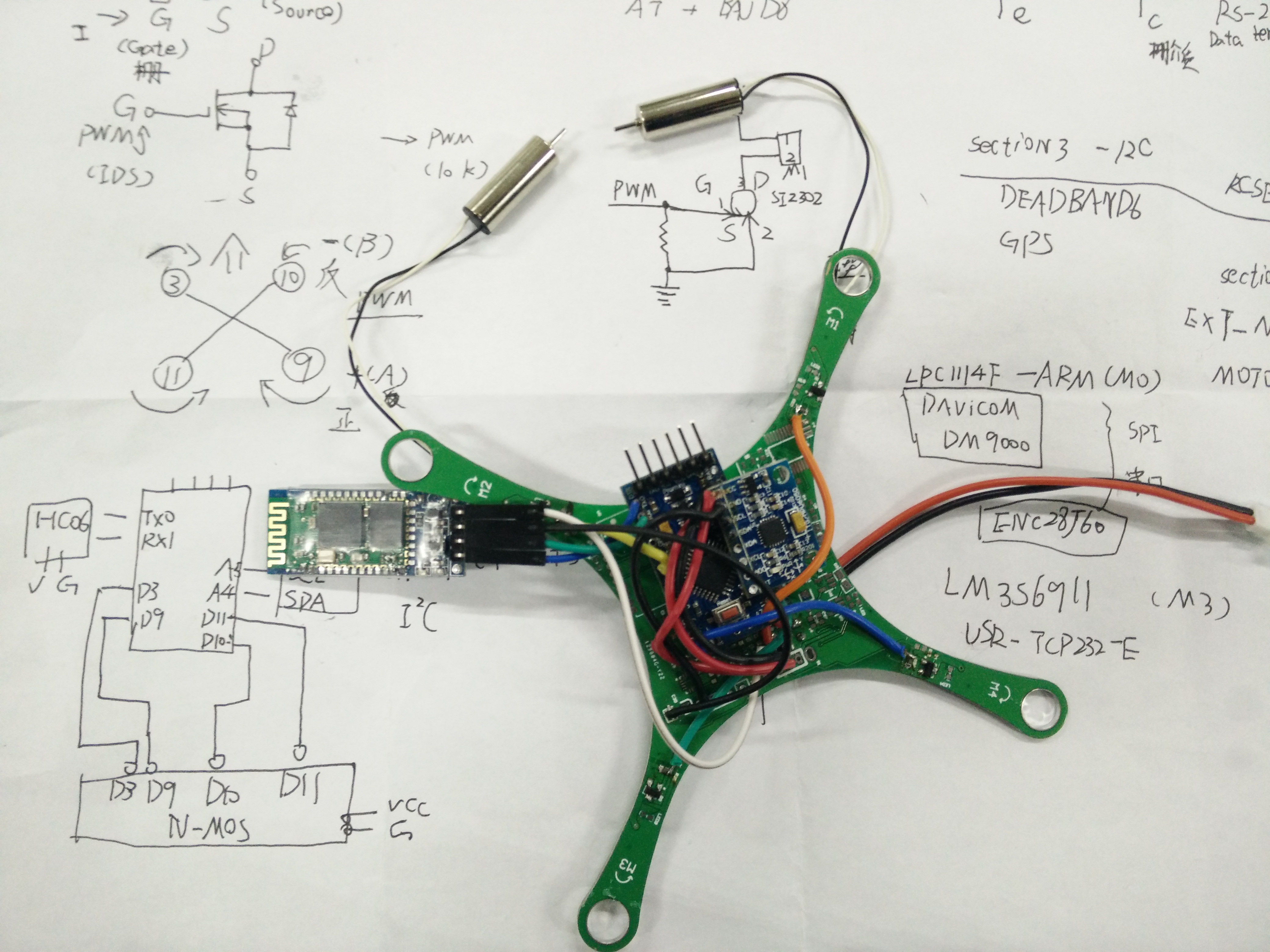
去年做了玩的,基本抄的MWC,今天又翻出来看看。
SI2302MOS管模拟电调,720空心杯,陀螺仪和加速度计用的MPU6050。主控AVR328P,直接用了Arduino mini核心板粗暴的粘在了底板上。控制本来打算用蓝牙,最后接了个接收机(逃
代码和算法全部抄袭MWC,config中改了I^C通信速率与启用空心杯电机的控制,别的也没什么了
/*************************************************************************************************/ /**** CONFIGURABLE PARAMETERS ****/ /*************************************************************************************************/ /* this file consists of several sections * to create a working combination you must at least make your choices in section 1. * 1 - BASIC SETUP - you must select an option in every block. 基础设置-每部分必须选择一项。 * this assumes you have 4 channels connected to your board with standard ESCs and servos.假设你有四通道连接到控制板,具有标准的电调和舵机。 * 2 - COPTER TYPE SPECIFIC OPTIONS - you likely want to check for options for your copter type 直升机细节选项-为你的直升机选择具体细节选项。 * 3 - RC SYSTEM SETUP 遥控系统设置 * 4 - ALTERNATE CPUs & BOARDS - if you have 备份CPUs和控制板-如果你有 * 5 - ALTERNATE SETUP - select alternate RX (SBUS, PPM, etc.), alternate ESC-range, etc. here 备份设置-选择备份方案(SBUS、PPM等),备份电调控制范围等, * 6 - OPTIONAL FEATURES - enable nice to have features here (FlightModes, LCD, telemetry, battery monitor etc.) 可选项-具备各种特征(飞行模式、LCD、遥测、电池监测等) * 7 - TUNING & DEVELOPER - if you know what you are doing; you have been warned 调教和开发 */ 继续阅读“MWC config文件(部分说明)”






