
去年做了玩的,基本抄的MWC,今天又翻出来看看。
SI2302MOS管模拟电调,720空心杯,陀螺仪和加速度计用的MPU6050。主控AVR328P,直接用了Arduino mini核心板粗暴的粘在了底板上。控制本来打算用蓝牙,最后接了个接收机(逃
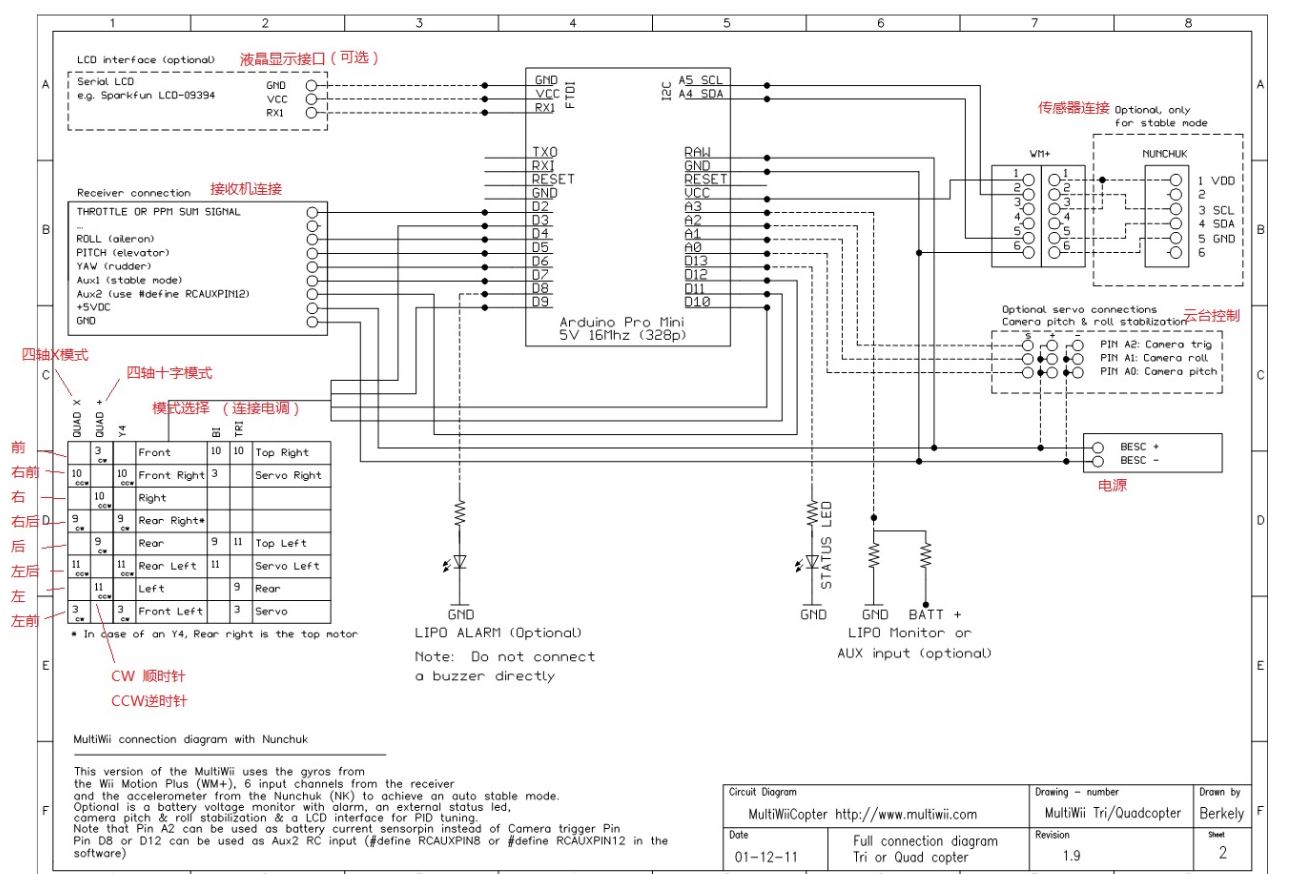
代码和算法全部抄袭MWC,config中改了I^C通信速率与启用空心杯电机的控制,别的也没什么了
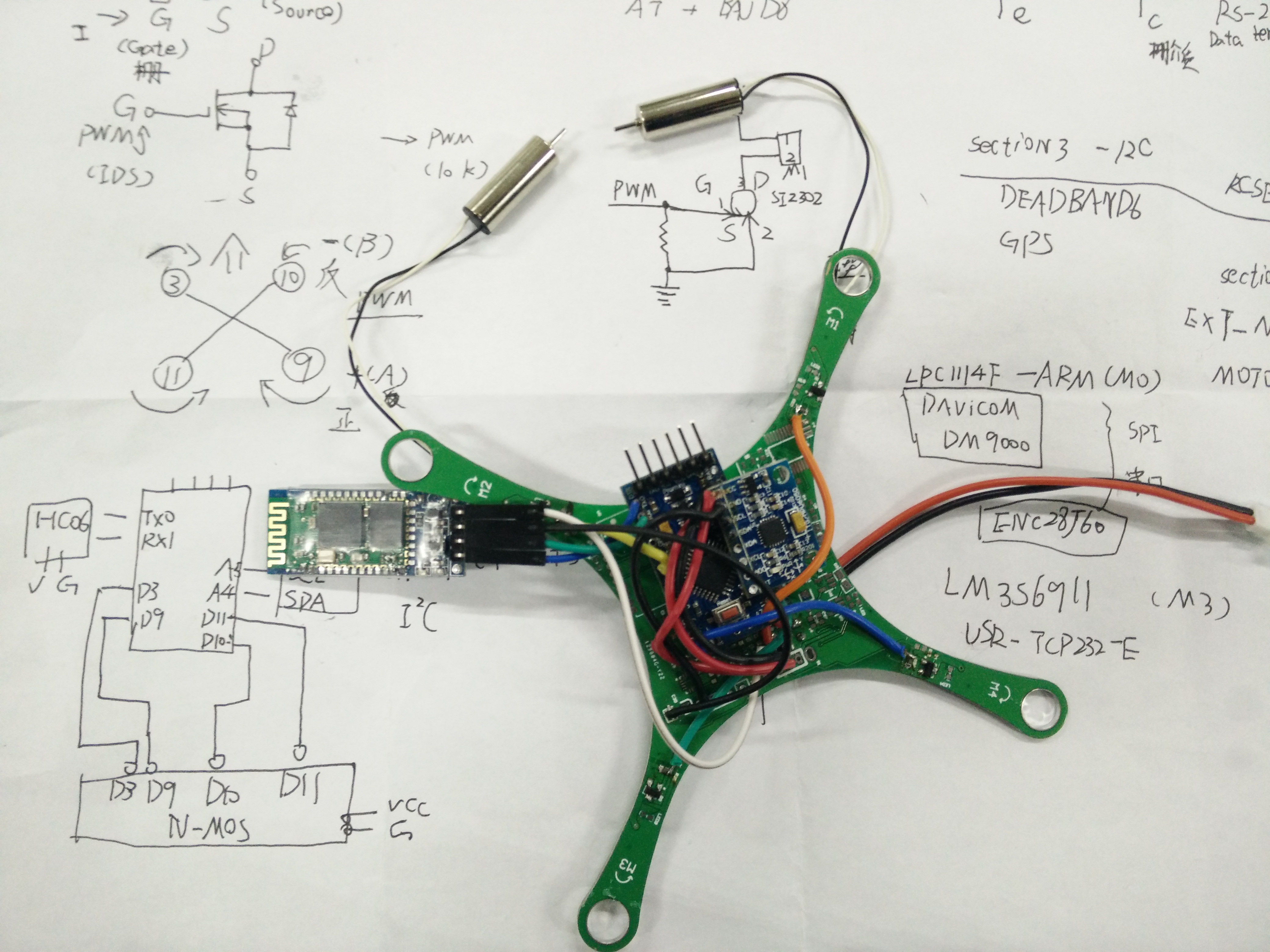
底板是朋友画的stm32主控的,因为后来用的arduino主控,所以只用了上面走的VCC,VDD 和mos管部分,主要当个架子用。。。。
没什么技术含量,有时间得改进下。贴张完工图与调参图。

调参

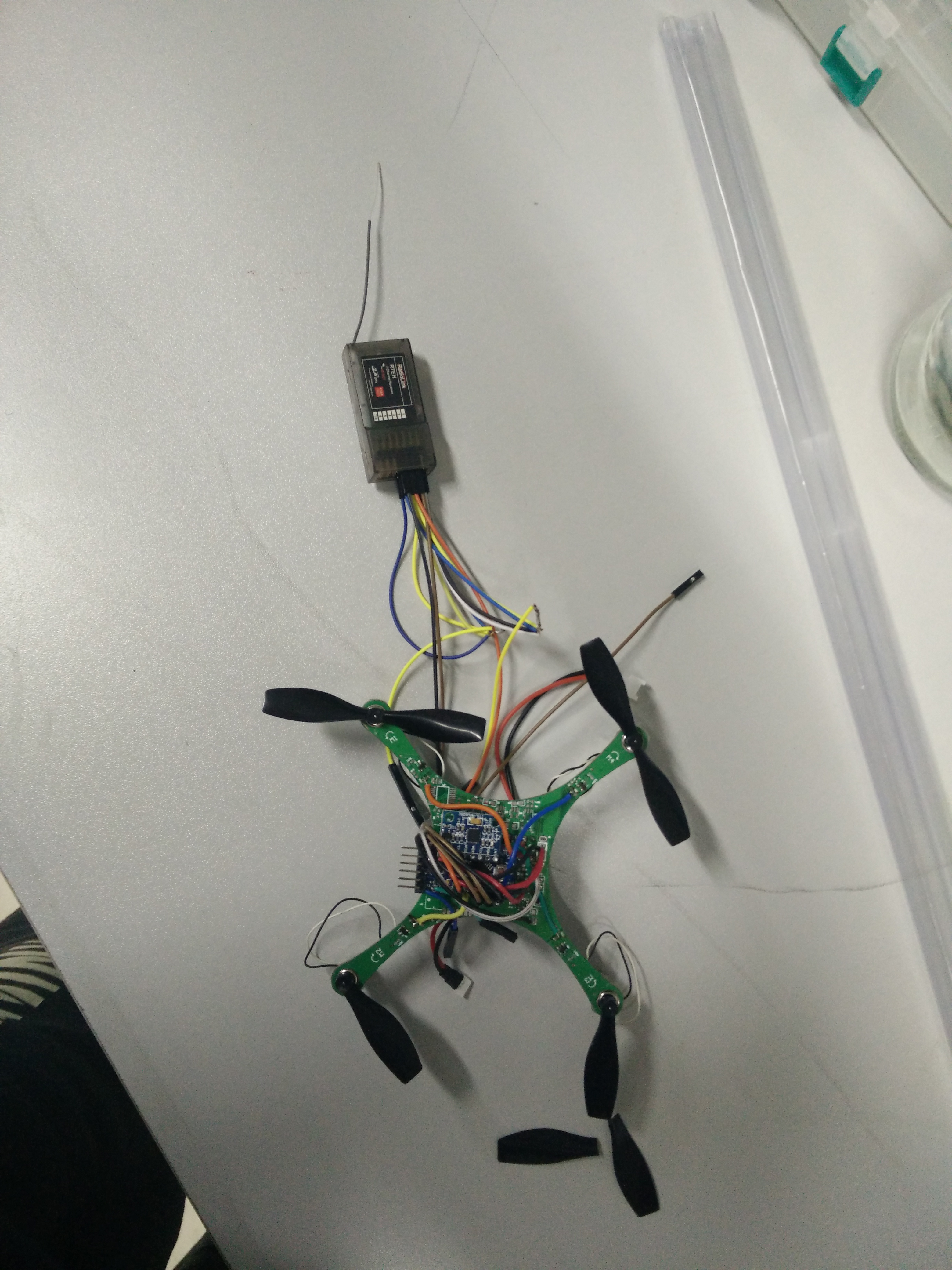
蓝牙模块挂了,用的接收机,超重了+重心不在主轴上,飞的特别烂。又偏又低。